Raj Bag
Robotics & Automation Engineer
About
I am a robotics and automation engineer specialising in ROS2-based robotic systems, simulation, and real-time robot control. My work focuses on developing reliable robotic architectures that bridge simulation and real-world deployment.
I recently completed my Master's in Automation, Robotics and 3D Manufacturing in Berlin, where I developed a ROS2-based control architecture for a 6-DOF robotic arm used in robotic additive manufacturing. My projects span robotic simulation, teleoperation and industrial automation using tools such as ROS2, Gazebo, URDF/Xacro, C++, and Python.
I enjoy working at the intersection of software and robotics hardware, building systems where algorithms translate into real motion. I am particularly interested in robot control architectures, robotic simulation, and intelligent automation systems.

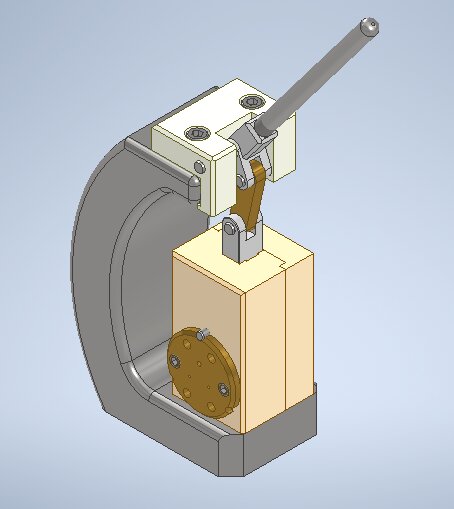
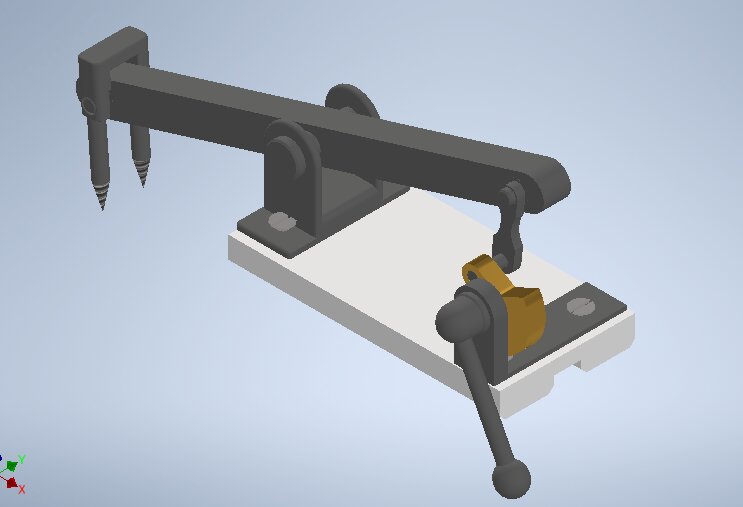
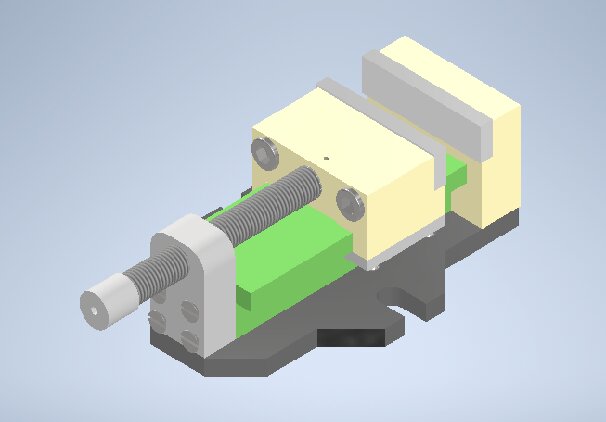
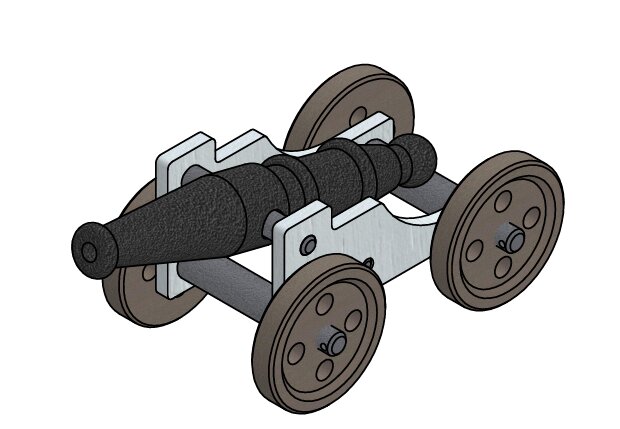
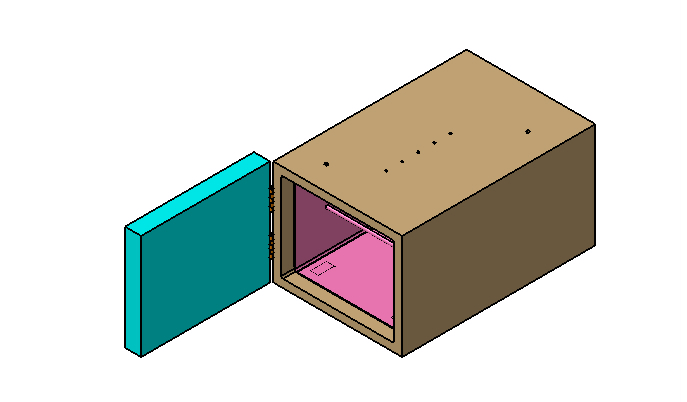
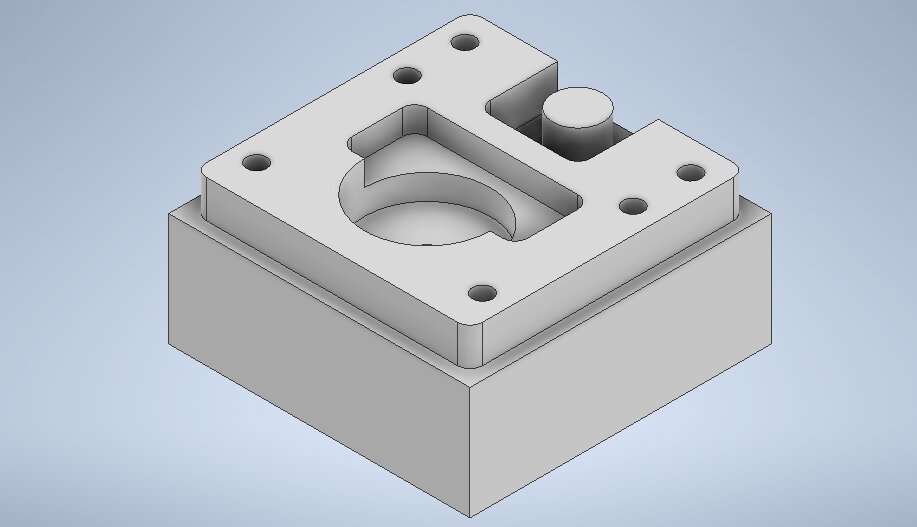
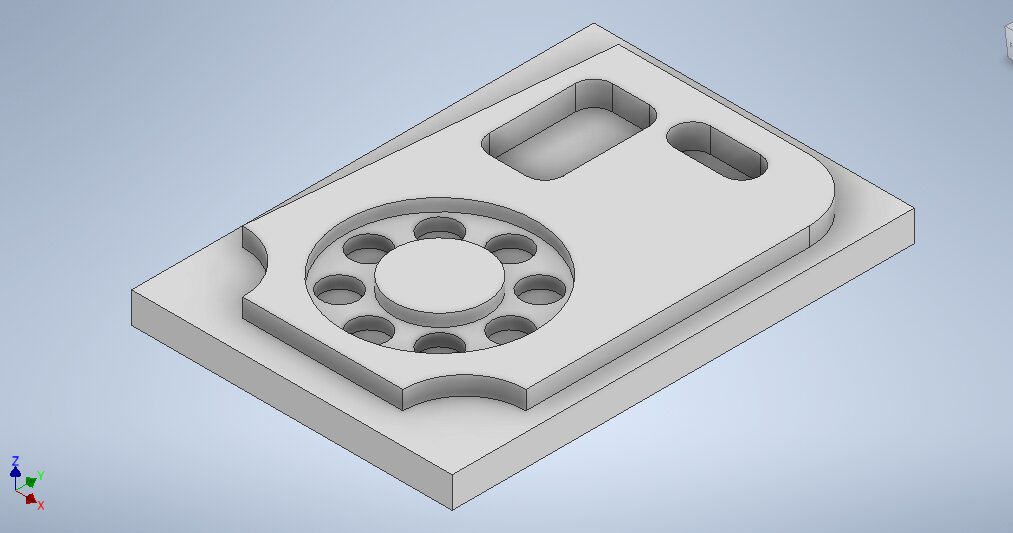
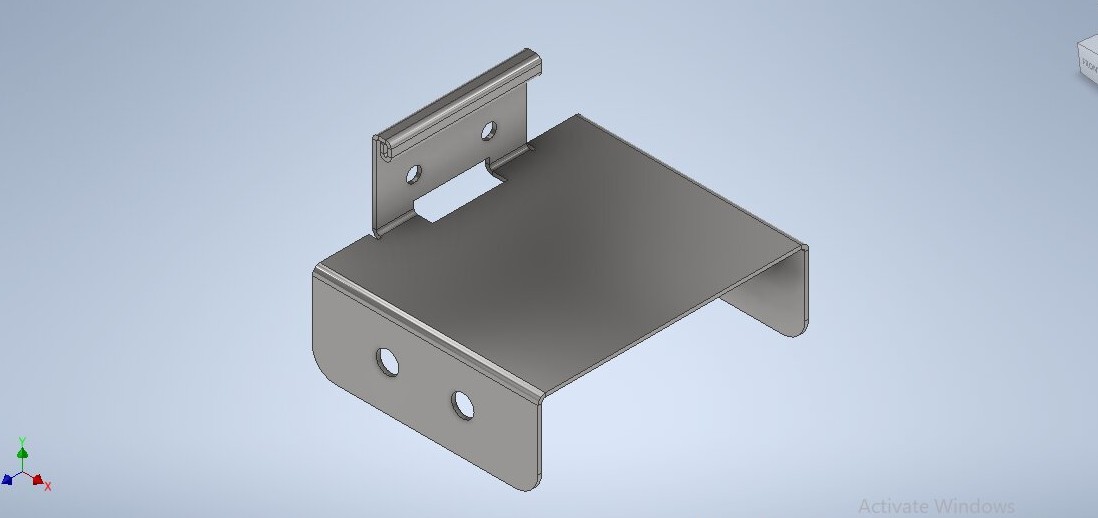
CAD Portfolio
Part designs & FEA / CFD simulation analysis